TR2014-059
Rainbow Flash Camera: Depth Edge Extraction Using Complementary Colors
-
- , "Rainbow Flash Camera: Depth Edge Extraction Using Complementary Colors", International Journal of Computer Vision, DOI: 10.1007/s11263-014-0726-4, Vol. 110, No. 2, pp. 156-171, November 2014.BibTeX TR2014-059 PDF
- @article{Taguchi2014may,
- author = {Taguchi, Y.},
- title = {{Rainbow Flash Camera: Depth Edge Extraction Using Complementary Colors}},
- journal = {International Journal of Computer Vision},
- year = 2014,
- volume = 110,
- number = 2,
- pages = {156--171},
- month = nov,
- doi = {10.1007/s11263-014-0726-4},
- issn = {1573-1405},
- url = {https://www.merl.com/publications/TR2014-059}
- }
- , "Rainbow Flash Camera: Depth Edge Extraction Using Complementary Colors", International Journal of Computer Vision, DOI: 10.1007/s11263-014-0726-4, Vol. 110, No. 2, pp. 156-171, November 2014.
-
Research Areas:
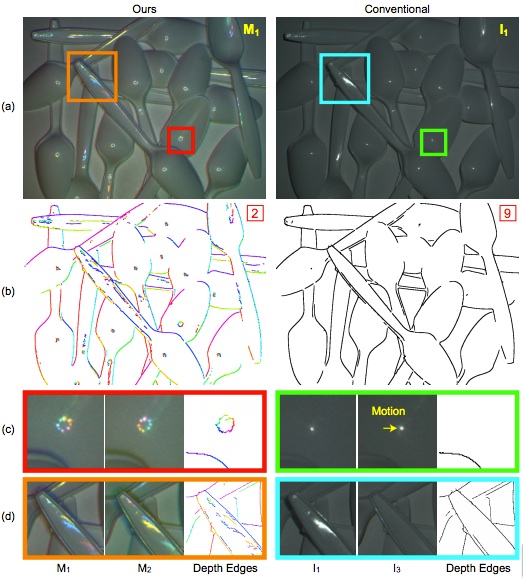
depth edges. (c, d) Close ups of two captured images (M1 and M2 for our method, I1 and I3 for the conventional method) and depth edges.
Abstract:
We present a novel color multiplexing method for extracting depth edges in a scene. It has been shown that casting shadows from different light positions provides a simple yet robust cue for extracting depth edges. Instead of flashing a single light source at a time as in conventional methods, our method flashes all light sources simultaneously to reduce the number of captured images. We use a ring light source around a camera and arrange colors on the ring such that the colors form a hue circle. Since complementary colors are arranged at any position and its antipole on the ring, shadow regions where a half of the hue circle is occluded are colorized according to the orientations of depth edges, while non-shadow regions where all the hues are mixed have a neutral color in the captured image. Thus the colored shadows in the single image directly provide depth edges and their orientations in an ideal situation. We present an algorithm that extracts depth edges from a single image by analyzing the colored shadows. We also present a more robust depth edge extraction algorithm using an additional image captured by rotating the hue circle with 180 degrees to compensate for scene textures and ambient lights. We compare our approach with conventional methods for various scenes using a camera prototype consisting of a standard camera and 8 color LEDs. We also demonstrate a bin-picking system using the camera prototype mounted on a robot arm.