TR2009-028
Nonlinearly Parameterized Adaptive PID Control for Parallel and Series Realizations
-
- , "Nonlinearly Parameterized Adaptive PID Control for Parallel and Series Realizations", American Control Conference (ACC), June 2009.
-
Research Area:
Abstract:
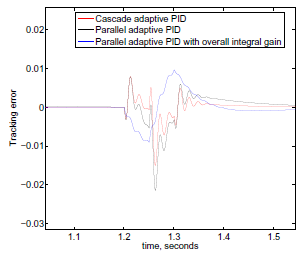
In this paper, a methodology for Lyapunov-based adaptive PID control for different nonlinearly-parameterized series and parallel PID realizations presented using simple first and second order dominant plants. The corresponding designs are based on using only the tracking error, its derivative, its integral, and the current value of the adaptive gains in order to update the PID gains. The conventional independent parallel realization, which most existing adaptive designs have used, yields a linearly parameterized adaptive control problem. Whereas, other parallel as well as series realizations yield nonlinearly parameterized adaptive systems allowing for coupled adaptation of the PID gains and further design flexibility. These coupled architectures promise to yield better adaptation and learning as they reflect the inherently coupled nature of PID tuning. Case study simulations are provided to demonstrate the capabilities of the developed algorithms.
Related News & Events
-
NEWS ACC 2009: publication by MERL researchers and others Date: June 10, 2009
Where: American Control Conference (ACC)
Research Area: ControlBrief- The paper "Nonlinearly Parameterized Adaptive PID Control for Parallel and Series Realizations" by El Rifai, K. was presented at the American Control Conference (ACC).