TR2011-063
Concentric Ring Signature Descriptor for 3D Objects
-
- , "Concentric Ring Signature Descriptor for 3D Objects", IEEE International Conference on Image Processing (ICIP), DOI: 10.1109/ICIP.2011.6116153, September 2011.BibTeX TR2011-063 PDF
- @inproceedings{Nguyen2011sep,
- author = {Nguyen, H.V. and Porikli, F.},
- title = {{Concentric Ring Signature Descriptor for 3D Objects}},
- booktitle = {IEEE International Conference on Image Processing (ICIP)},
- year = 2011,
- month = sep,
- doi = {10.1109/ICIP.2011.6116153},
- url = {https://www.merl.com/publications/TR2011-063}
- }
- , "Concentric Ring Signature Descriptor for 3D Objects", IEEE International Conference on Image Processing (ICIP), DOI: 10.1109/ICIP.2011.6116153, September 2011.
-
Research Areas:
Abstract:
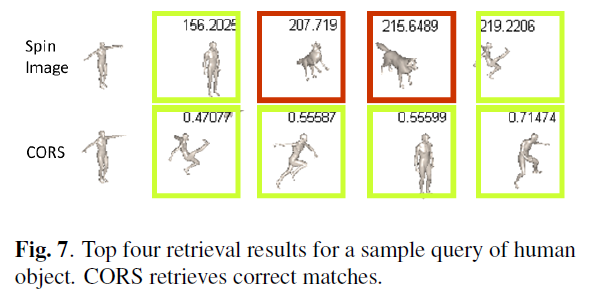
We present a 3D feature descriptor that represents local topologies within a set of folded concentric rings by distances from local points to a projection plane. This feature, called as Concentric Ring Signature (CORS), possesses similar computational advantages to point signatures yet provides more accurate matches. It produces more compact and discriminative descriptors than shape context. It robust to noise and occlusions. As opposed to spin images, CORS does not require the point normal estimations, therefore it is directly applicable to sparse point clouds where the point densities are insufficiently low. Under the same settings, we demonstrate that the discriminative power of CORS is superior to conventional approaches producing twice as good estimates with the percentage of correct match scores improving from 39% to
88%.
Related News & Events
-
NEWS ICIP 2011: 4 publications by Matthew E. Brand, Petros T. Boufounos, Shantanu D. Rane, Anthony Vetro and Dong Tian Date: September 11, 2011
Where: IEEE International Conference on Image Processing (ICIP)
MERL Contacts: Matthew Brand; Anthony Vetro; Petros T. BoufounosBrief- The papers "Distributed Compression of Zerotrees of Wavelet Coefficients" by Wang, Y., Rane, S., Boufounos, P. and Vetro, A., "A Trellis-based Approach for Robust View Synthesis" by Tian, D., Vetro, A. and Brand, M., "Concentric Ring Signature Descriptor for 3D Objects" by Nguyen, H.V. and Porikli, F. and "Parallel Quadratic Programming for Image Processing" by Brand, M. and Chen, D. were presented at the IEEE International Conference on Image Processing (ICIP).