TR2026-056
Revisiting Monocular SLAM with Spatio-Temporal Scene Modeling
-
- , "Revisiting Monocular SLAM with Spatio-Temporal Scene Modeling", IEEE Conference on Computer Vision and Pattern Recognition (CVPR), May 2026.BibTeX TR2026-056 PDF Video Software Presentation
- @inproceedings{Piedade2026may,
- author = {{Piedade, Valter and Manam, Lalit and Yamazaki, Masashi and Miraldo, Pedro}},
- title = {{Revisiting Monocular SLAM with Spatio-Temporal Scene Modeling}},
- booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-056}
- }
- , "Revisiting Monocular SLAM with Spatio-Temporal Scene Modeling", IEEE Conference on Computer Vision and Pattern Recognition (CVPR), May 2026.
-
MERL Contacts:
-
Research Areas:


Abstract:
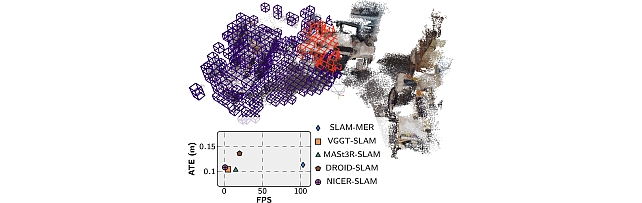
Visual SLAM is one of the most fundamental problems in computer vision, with direct applications to real-time localization tasks such as AR/VR, robotics, and 3D scene re- construction. Although significant progress has been made in both sparse and dense approaches, real-time monocular SLAM remains challenging—particularly in the uncalibrated setting, where existing methods are often inefficient and lack modularity. In this paper, we present a new visual SLAM pipeline, called SLAM-MER, which is implemented from scratch in C++ explicitly leveraging the spatio-temporal structure of the SLAM problem for improved localization, and has modular design to easily integrate off-the-shelf components. We introduce a temporal representation based on a buffer of recent keyframes that preserves short-term scene continuity. We complement this by incorporating a spatial representation based on a 3D cell-based scene model, enabling efficient retrieval of relevant 3D points from previously reconstructed regions. Leveraging recent feed-forward geometry estimators, our hybrid design combines sparse keypoint-based localization with a semi-dense anchor-point–driven spatial representation. This integration allows us to achieve real-time per- formance (exceeding 80 FPS) and a substantial efficiency improvement compared to existing uncalibrated monocular SLAM pipelines, while maintaining or improving localization accuracy.