Diego Romeres

- Phone: 617-621-7561
- Email:
-
Position:
Research / Technical Staff
Senior Principal Research Scientist,
Team Leader -
Education:
Ph.D., University of Padova, 2017 -
Research Areas:
External Links:
Diego's Quick Links
-
Biography
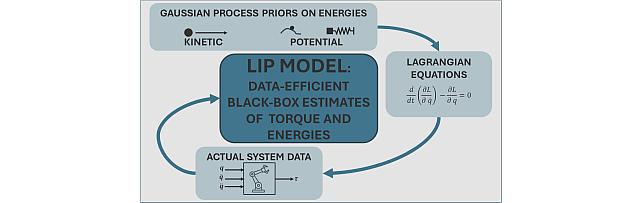
Diego's research interests are in machine learning, system identification and robotic applications. At MERL he is currently working on applying nonparametric machine learning techniques for the control of robotic platforms. His Ph.D. thesis is about the combination of nonparametric data-driven models and physics-based models in gaussian processes for robot dynamics learning.
-
Recent News & Events
-
NEWS MERL Researcher Diego Romeres Collaborates with Mitsubishi Electric and University of Padua to Advance Physics-Embedded AI for Predictive Equipment Maintenance Date: December 10, 2025
MERL Contact: Diego Romeres
Research Areas: Artificial Intelligence, Machine Learning, RoboticsBrief- Mitsubishi Electric Research Laboratories (MERL) researchers, together with collaborators at Mitsubishi Electric’s Information Technology R&D Center in Kamakura, Kanagawa Prefecture, Japan, and the Department of Information Engineering at the University of Padua, have developed a cutting-edge physics-embedded AI technology that substantially improves the accuracy of equipment degradation estimation using minimal training data. This collaborative effort has culminated in a press release by Mitsubishi Electric Corporation announcing the new AI technology as part of its Neuro-Physical AI initiative under the Maisart program.
The interdisciplinary team, including MERL Senior Principal Research Scientist and Team Leader Diego Romeres and University of Padua researchers Alberto Dalla Libera and Giulio Giacomuzzo, combined expertise in machine learning, physical modeling, and real-world industrial systems to embed physics-based models directly into AI frameworks. By training AI with theoretical physical laws and real operational data, the resulting system delivers reliable degradation estimates on the torque of robotic arms even with limited datasets. This result addresses key challenges in preventive maintenance for complex manufacturing environments and supports reduced downtime, maintained quality, and lower lifecycle costs.
The successful integration of these foundational research efforts into Mitsubishi Electric’s business-scale AI solutions exemplifies MERL’s commitment to translating fundamental innovation into real-world impact.
- Mitsubishi Electric Research Laboratories (MERL) researchers, together with collaborators at Mitsubishi Electric’s Information Technology R&D Center in Kamakura, Kanagawa Prefecture, Japan, and the Department of Information Engineering at the University of Padua, have developed a cutting-edge physics-embedded AI technology that substantially improves the accuracy of equipment degradation estimation using minimal training data. This collaborative effort has culminated in a press release by Mitsubishi Electric Corporation announcing the new AI technology as part of its Neuro-Physical AI initiative under the Maisart program.
-
NEWS MERL Researchers at NeurIPS 2025 presented 2 conference papers, 5 workshop papers, and organized a workshop. Date: December 2, 2025 - December 7, 2025
Where: San Diego
MERL Contacts: Petros T. Boufounos; Anoop Cherian; Radu Corcodel; Stefano Di Cairano; Chiori Hori; Christopher R. Laughman; Suhas Lohit; Pedro Miraldo; Saviz Mowlavi; Kuan-Chuan Peng; Arvind Raghunathan; Diego Romeres; Abraham P. Vinod; Pu (Perry) Wang
Research Areas: Artificial Intelligence, Computational Sensing, Computer Vision, Control, Data Analytics, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Optimization, Robotics, Signal Processing, Speech & AudioBrief- MERL researchers presented 2 main-conference papers and 5 workshop papers, as well as organized a workshop, at NeurIPS 2025.
Main Conference Papers:
1) Sorachi Kato, Ryoma Yataka, Pu Wang, Pedro Miraldo, Takuya Fujihashi, and Petros Boufounos, "RAPTR: Radar-based 3D Pose Estimation using Transformer", Code available at: https://github.com/merlresearch/radar-pose-transformer
2) Runyu Zhang, Arvind Raghunathan, Jeff Shamma, and Na Li, "Constrained Optimization From a Control Perspective via Feedback Linearization"
Workshop Papers:
1) Yuyou Zhang, Radu Corcodel, Chiori Hori, Anoop Cherian, and Ding Zhao, "SpinBench: Perspective and Rotation as a Lens on Spatial Reasoning in VLMs", NeuriIPS 2025 Workshop on SPACE in Vision, Language, and Embodied AI (SpaVLE) (Best Paper Runner-up)
2) Xiaoyu Xie, Saviz Mowlavi, and Mouhacine Benosman, "Smooth and Sparse Latent Dynamics in Operator Learning with Jerk Regularization", Workshop on Machine Learning and the Physical Sciences (ML4PS)
3) Spencer Hutchinson, Abraham Vinod, François Germain, Stefano Di Cairano, Christopher Laughman, and Ankush Chakrabarty, "Quantile-SMPC for Grid-Interactive Buildings with Multivariate Temporal Fusion Transformers", Workshop on UrbanAI: Harnessing Artificial Intelligence for Smart Cities (UrbanAI)
4) Yuki Shirai, Kei Ota, Devesh Jha, and Diego Romeres, "Sim-to-Real Contact-Rich Pivoting via Optimization-Guided RL with Vision and Touch", Worskhop on Embodied World Models for Decision Making
5) Mark Van der Merwe and Devesh Jha, "In-Context Policy Iteration for Dynamic Manipulation", Workshop on Embodied World Models for Decision Making
Workshop Organized:
MERL members co-organized the Multimodal Algorithmic Reasoning (MAR) Workshop (https://marworkshop.github.io/neurips25/). Organizers: Anoop Cherian (Mitsubishi Electric Research Laboratories), Kuan-Chuan Peng (Mitsubishi Electric Research Laboratories), Suhas Lohit (Mitsubishi Electric Research Laboratories), Honglu Zhou (Salesforce AI Research), Kevin Smith (Massachusetts Institute of Technology), and Joshua B. Tenenbaum (Massachusetts Institute of Technology).
- MERL researchers presented 2 main-conference papers and 5 workshop papers, as well as organized a workshop, at NeurIPS 2025.
See All News & Events for Diego -
-
Awards
-
AWARD University of Padua and MERL team wins the AI Olympics with RealAIGym competition at IROS24 Date: October 17, 2024
Awarded to: Niccolò Turcato, Alberto Dalla Libera, Giulio Giacomuzzo, Ruggero Carli, Diego Romeres
MERL Contact: Diego Romeres
Research Areas: Artificial Intelligence, Dynamical Systems, Machine Learning, RoboticsBrief- The team composed of the control group at the University of Padua and MERL's Optimization and Robotic team ranked 1st out of the 4 finalist teams that arrived to the 2nd AI Olympics with RealAIGym competition at IROS 24, which focused on control of under-actuated robots. The team was composed by Niccolò Turcato, Alberto Dalla Libera, Giulio Giacomuzzo, Ruggero Carli and Diego Romeres. The competition was organized by the German Research Center for Artificial Intelligence (DFKI), Technical University of Darmstadt and Chalmers University of Technology.
The competition and award ceremony was hosted by IEEE International Conference on Intelligent Robots and Systems (IROS) on October 17, 2024 in Abu Dhabi, UAE. Diego Romeres presented the team's method, based on a model-based reinforcement learning algorithm called MC-PILCO.
- The team composed of the control group at the University of Padua and MERL's Optimization and Robotic team ranked 1st out of the 4 finalist teams that arrived to the 2nd AI Olympics with RealAIGym competition at IROS 24, which focused on control of under-actuated robots. The team was composed by Niccolò Turcato, Alberto Dalla Libera, Giulio Giacomuzzo, Ruggero Carli and Diego Romeres. The competition was organized by the German Research Center for Artificial Intelligence (DFKI), Technical University of Darmstadt and Chalmers University of Technology.
-
AWARD Honorable Mention Award at NeurIPS 23 Instruction Workshop Date: December 15, 2023
Awarded to: Lingfeng Sun, Devesh K. Jha, Chiori Hori, Siddharth Jain, Radu Corcodel, Xinghao Zhu, Masayoshi Tomizuka and Diego Romeres
MERL Contacts: Radu Corcodel; Chiori Hori; Siddarth Jain; Diego Romeres
Research Areas: Artificial Intelligence, Machine Learning, RoboticsBrief- MERL Researchers received an "Honorable Mention award" at the Workshop on Instruction Tuning and Instruction Following at the NeurIPS 2023 conference in New Orleans. The workshop was on the topic of instruction tuning and Instruction following for Large Language Models (LLMs). MERL researchers presented their work on interactive planning using LLMs for partially observable robotic tasks during the oral presentation session at the workshop.
-
AWARD Joint University of Padua-MERL team wins Challenge 'AI Olympics With RealAIGym' Date: August 25, 2023
Awarded to: Alberto Dalla Libera, Niccolo' Turcato, Giulio Giacomuzzo, Ruggero Carli, Diego Romeres
MERL Contact: Diego Romeres
Research Areas: Artificial Intelligence, Machine Learning, RoboticsBrief- A joint team consisting of members of University of Padua and MERL ranked 1st in the IJCAI2023 Challenge "Al Olympics With RealAlGym: Is Al Ready for Athletic Intelligence in the Real World?". The team was composed by MERL researcher Diego Romeres and a team from University Padua (UniPD) consisting of Alberto Dalla Libera, Ph.D., Ph.D. Candidates: Niccolò Turcato, Giulio Giacomuzzo and Prof. Ruggero Carli from University of Padua.
The International Joint Conference on Artificial Intelligence (IJCAI) is a premier gathering for AI researchers and organizes several competitions. This year the competition CC7 "AI Olympics With RealAIGym: Is AI Ready for Athletic Intelligence in the Real World?" consisted of two stages: simulation and real-robot experiments on two under-actuated robotic systems. The two robotics systems were treated as separate tracks and one final winner was selected for each track based on specific performance criteria in the control tasks.
The UniPD-MERL team competed and won in both tracks. The team's system made strong use of a Model-based Reinforcement Learning algorithm called (MC-PILCO) that we recently published in the journal IEEE Transaction on Robotics.
- A joint team consisting of members of University of Padua and MERL ranked 1st in the IJCAI2023 Challenge "Al Olympics With RealAlGym: Is Al Ready for Athletic Intelligence in the Real World?". The team was composed by MERL researcher Diego Romeres and a team from University Padua (UniPD) consisting of Alberto Dalla Libera, Ph.D., Ph.D. Candidates: Niccolò Turcato, Giulio Giacomuzzo and Prof. Ruggero Carli from University of Padua.
-
-
MERL Publications
- , "PPGuide: Steering Diffusion Policies with Performance Predictive Guidance", arXiv, March 2026.
- , "Embedding Morphology into Transformers for Cross-Robot Policy Learning", arXiv, February 2026.BibTeX arXiv
- @article{Suzuki2026feb,
- author = {{Suzuki, Kei and Liu, Jing and Wang, Ye and Hori, Chiori and Brand, Matthew and Romeres, Diego and Koike-Akino, Toshiaki}},
- title = {{Embedding Morphology into Transformers for Cross-Robot Policy Learning}},
- journal = {arXiv},
- year = 2026,
- month = feb,
- url = {https://arxiv.org/abs/2603.00182}
- }
- , "Reinforcement Learning for Robust Athletic Intelligence: Lessons from the 2nd “AI Olympics with RealAIGym” Competition", IEEE Robotics & Automation Magazine, January 2026.BibTeX TR2026-013 PDF
- @article{Wiebe2026jan,
- author = {{{Wiebe, Felix and Turcato, Niccolò and Dalla Libera, Alberto and Seong Bjorn Choe, Jean and Choi, Bumkyu and Faust, Tim Lukas and Maraqten, Habib and Aghadavoodi, Erfan and Cali, Marco and Sinigaglia, Alberto and Giacomuzzo, Giulio and Carli, Ruggero and Romeres, Diego and Kim, Jong-kook and Susto, Gian Antonio and Vyas, Shubham and Mronga, Dennis and Belousov, Boris and Peters, Jan and Kirchner, Frank and Kumar, Shivesh}}},
- title = {{{Reinforcement Learning for Robust Athletic Intelligence: Lessons from the 2nd “AI Olympics with RealAIGym” Competition}}},
- journal = {IEEE Robotics \& Automation Magazine},
- year = 2026,
- month = jan,
- url = {https://www.merl.com/publications/TR2026-013}
- }
- , "Learning Non-prehensile Manipulation with Force and Vision Feedback Using Optimization-based Demonstrations", IEEE Robotics and Automation Letters, January 2026.BibTeX TR2026-011 PDF Video
- @article{Shirai2026jan,
- author = {Shirai, Yuki and Ota, Kei and Jha, Devesh K. and Romeres, Diego},
- title = {{Learning Non-prehensile Manipulation with Force and Vision Feedback Using Optimization-based Demonstrations}},
- journal = {IEEE Robotics and Automation Letters},
- year = 2026,
- month = jan,
- url = {https://www.merl.com/publications/TR2026-011}
- }
- , "Real-time Human Progress Estimation with Online Dynamic Time Warping for Collaborative Robotics", Frontiers, December 2025.BibTeX TR2025-173 PDF
- @article{DeLazzari2025dec,
- author = {De Lazzari, Davide and Terreran, Matteo and Giacomuzzo, Giulio and Jain, Siddarth and Falco, Pietro and Carli, Ruggero and Ghidoni, Stefano and Romeres, Diego},
- title = {{Real-time Human Progress Estimation with Online Dynamic Time Warping for Collaborative Robotics}},
- journal = {Frontiers},
- year = 2025,
- month = dec,
- url = {https://www.merl.com/publications/TR2025-173}
- }
-
Other Publications
- , "On-line bayesian system identification", Control Conference (ECC), 2016 European, 2016, pp. 1359-1364.BibTeX
- @Inproceedings{romeres2016line,
- author = {Romeres, Diego and Prando, Giulia and Pillonetto, Gianluigi and Chiuso, Alessandro},
- title = {On-line bayesian system identification},
- booktitle = {Control Conference (ECC), 2016 European},
- year = 2016,
- pages = {1359--1364},
- organization = {IEEE}
- }
- , "Online semi-parametric learning for inverse dynamics modeling", Decision and Control (CDC), 2016 IEEE 55th Conference on, 2016, pp. 2945-2950.BibTeX
- @Inproceedings{romeres2016online,
- author = {Romeres, Diego and Zorzi, Mattia and Camoriano, Raffaello and Chiuso, Alessandro},
- title = {Online semi-parametric learning for inverse dynamics modeling},
- booktitle = {Decision and Control (CDC), 2016 IEEE 55th Conference on},
- year = 2016,
- pages = {2945--2950},
- organization = {IEEE}
- }
- , "Online semi-parametric learning for inverse dynamics modeling", Decision and Control (CDC), 2016 IEEE 55th Conference on, 2016, pp. 2945-2950.BibTeX
- @Inproceedings{romeres2016onlinesemiparametric,
- author = {Romeres, Diego and Zorzi, Mattia and Camoriano, Raffaello and Chiuso, Alessandro},
- title = {Online semi-parametric learning for inverse dynamics modeling},
- booktitle = {Decision and Control (CDC), 2016 IEEE 55th Conference on},
- year = 2016,
- pages = {2945--2950},
- organization = {IEEE}
- }
- , "Classical vs. Bayesian methods for linear system identification: Point estimators and confidence sets", Control Conference (ECC), 2016 European, 2016, pp. 1365-1370.BibTeX
- @Inproceedings{tprando2016classical,
- author = {Prando, Giulia and Romeres, Diego and Pillonetto, Gianluigi and Chiuso, Alessandro},
- title = {Classical vs. Bayesian methods for linear system identification: Point estimators and confidence sets},
- booktitle = {Control Conference (ECC), 2016 European},
- year = 2016,
- pages = {1365--1370},
- organization = {IEEE}
- }
- , "Online identification of time-varying systems: A Bayesian approach", Decision and Control (CDC), 2016 IEEE 55th Conference on, 2016, pp. 3775-3780.BibTeX
- @Inproceedings{tprando2016online,
- author = {Prando, Giulia and Romeres, Diego and Chiuso, Alessandro},
- title = {Online identification of time-varying systems: A Bayesian approach},
- booktitle = {Decision and Control (CDC), 2016 IEEE 55th Conference on},
- year = 2016,
- pages = {3775--3780},
- organization = {IEEE}
- }
- , "Region of attraction of power systems", IFAC Proceedings Volumes, Vol. 46, No. 27, pp. 49-54, 2013.BibTeX
- @Article{munz2013region,
- author = {Muenz, Ulrich and Romeres, Diego},
- title = {Region of attraction of power systems},
- journal = {IFAC Proceedings Volumes},
- year = 2013,
- volume = 46,
- number = 27,
- pages = {49--54},
- publisher = {Elsevier}
- }
- , "Novel results on slow coherency in consensus and power networks", Control Conference (ECC), 2013 European, 2013, pp. 742-747.BibTeX
- @Inproceedings{romeres2013novel,
- author = {Romeres, Diego and Doerfler, Florian and Bullo, Francesco},
- title = {Novel results on slow coherency in consensus and power networks},
- booktitle = {Control Conference (ECC), 2013 European},
- year = 2013,
- pages = {742--747},
- organization = {IEEE}
- }
- , "Distributed multi-hop reactive power compensation in smart micro-grids subject to saturation constraints", Decision and Control (CDC), 2012 IEEE 51st Annual Conference on, 2012, pp. 1118-1123.BibTeX
- @Inproceedings{bolognani2012distributed,
- author = {Bolognani, Saverio and Carron, Andrea and Di Vittorio, Alberto and Romeres, Diego and Schenato, Luca and Zampieri, Sandro},
- title = {Distributed multi-hop reactive power compensation in smart micro-grids subject to saturation constraints},
- booktitle = {Decision and Control (CDC), 2012 IEEE 51st Annual Conference on},
- year = 2012,
- pages = {1118--1123},
- organization = {IEEE}
- }
- , "On-line bayesian system identification", Control Conference (ECC), 2016 European, 2016, pp. 1359-1364.
-
Software & Data Downloads
-
Videos
-
MERL Issued Patents
-
Title: "System and Method for Robotic Planning in Partially Observable Environments Using Large Language Models"
Inventors: Jha, Devesh; Sun, Lingfeng; Hori, Chiori; Romeres, Diego
Patent No.: 12,515,331
Issue Date: Jan 6, 2026 -
Title: "System and Method for Learning Sequences in Robotic Tasks for Generalization to New Tasks"
Inventors: Jha, Devesh; Romeres, Diego; Nikovski, Daniel N.
Patent No.: 12,479,092
Issue Date: Nov 25, 2025 -
Title: "System and Method for Controlling a Robotic Manipulator Based on Hierarchical Reinforcement Learning of Control Policies"
Inventors: Jha, Devesh; Vats, Shivam; Romeres, Diego
Patent No.: 12,479,090
Issue Date: Nov 25, 2025 -
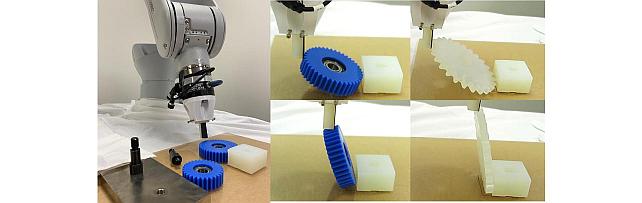
Title: "System and Method for Robust Pivoting for Re-Orienting Parts during Robotic Assembly"
Inventors: Jha, Devesh; Shirai, Yuki; Raghunathan, Arvind U.; Romeres, Diego
Patent No.: 12,397,425
Issue Date: Aug 26, 2025 -
Title: "System and Method for Controlling a Robotic Manipulator"
Inventors: Romeres, Diego; Zhang, Xiang
Patent No.: 12,397,419
Issue Date: Aug 26, 2025 -
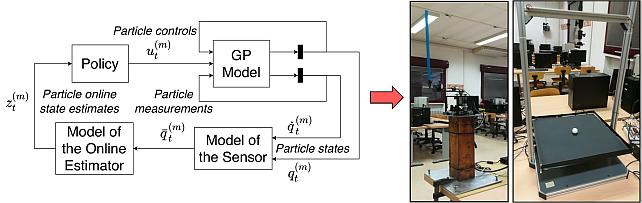
Title: "Method and System for Modelling and Control Partially Measurable Systems"
Inventors: Romeres, Diego; Amadio, Fabio; Libera, Alberto Dalla; Antonello, Riccardo; Carli, Ruggero; Nikovski, Daniel N.
Patent No.: 12,346,115
Issue Date: Jul 1, 2025 -
Title: "Apparatuses Systems and Methods for Optimization-Based Control of Physical Systems"
Inventors: Chakrabarty, Ankush; Quirynen, Rien; Romeres, Diego; Di Cairano, Stefano
Patent No.: 12,346,072
Issue Date: Jul 1, 2025 -
Title: "System and Method for Controlling a Robot using Constrained Dynamic Movement Primitives"
Inventors: Jha, Devesh; Shaw, Seiji; Raghunathan, Arvind U.; Corcodel, Radu Ioan; Romeres, Diego; Nikovski, Daniel N.
Patent No.: 12,343,876
Issue Date: Jul 1, 2025 -
Title: "System and Method for Robust Robotic Manipulation using Chance Constrained Optimization"
Inventors: Jha, Devesh; Raghunathan, Arvind U.; Romeres, Diego
Patent No.: 12,049,007
Issue Date: Jul 30, 2024 -
Title: "OBJECT MANIPULATION WITH COLLISION AVOIDANCE USING COMPLEMENTARITY CONSTRAINTS"
Inventors: Raghunathan, Arvind U.; Jha, Devesh; Romeres, Diego
Patent No.: 11,883,962
Issue Date: Jan 30, 2024 -
Title: "System and Method for Robotic Assembly Based on Adaptive Compliance"
Inventors: Nikovski, Daniel N.; Romeres, Diego; Jha, Devesh; Yerazunis, William S.
Patent No.: 11,673,264
Issue Date: Jun 13, 2023 -
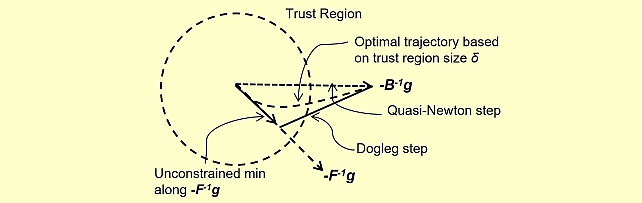
Title: "System and Method for Policy Optimization using Quasi-Newton Trust Region Method"
Inventors: Jha, Devesh; Raghunathan, Arvind U; Romeres, Diego
Patent No.: 11,650,551
Issue Date: May 16, 2023 -
Title: "Systems and Methods Automatic Anomaly Detection in Mixed Human-Robot Manufacturing Processes"
Inventors: Laftchiev, Emil; Romeres, Diego
Patent No.: 11,472,028
Issue Date: Oct 18, 2022 -
Title: "Systems and Methods for Advance Anomaly Detection in a Discrete Manufacturing Process with a Task Performed by a Human-Robot Team"
Inventors: Laftchiev, Emil; Romeres, Diego
Patent No.: 11,442,429
Issue Date: Sep 13, 2022 -
Title: "System and Design of Derivative-free Model Learning for Robotic Systems"
Inventors: Romeres, Diego; Libera, Alberto Dalla; Jha, Devesh; Nikovski, Daniel Nikolaev
Patent No.: 11,389,957
Issue Date: Jul 19, 2022 -
Title: "System and Method for Thermal Control Based on Invertible Causation Relationship"
Inventors: Laftchiev, Emil; Nikovski, Daniel N.; Romeres, Diego
Patent No.: 11,280,514
Issue Date: Mar 22, 2022 -
Title: "System and Method for Automatic Error Recovery in Robotic Assembly"
Inventors: Nikovski, Daniel Nikolaev; Jha, Devesh; Romeres, Diego
Patent No.: 11,161,244
Issue Date: Nov 2, 2021
-
Title: "System and Method for Robotic Planning in Partially Observable Environments Using Large Language Models"