Optimization
Efficient solutions to large-scale problems.
Much of MERL's research activity involves formulating scientific and engineering problems as optimizations, which can be solved in an efficient way. We have developed fundamental algorithms to better solve classic problems, such as quadratic programs and minimum-cost paths. Our work also involves developing theoretical bounds to understand performance limits.
Quick Links
-
Researchers

Stefano
Di Cairano

Arvind
Raghunathan

Toshiaki
Koike-Akino

Daniel N.
Nikovski

Christopher R.
Laughman

Yebin
Wang

Philip V.
Orlik

Abraham P.
Vinod
Ye
Wang

Kieran
Parsons

Scott A.
Bortoff

Avishai
Weiss

Petros T.
Boufounos

Matthew
Brand

Hassan
Mansour

Jianlin
Guo

Pu
(Perry)
Wang
Vedang M.
Deshpande

Hongbo
Sun

Hongtao
Qiao

Dehong
Liu

Bingnan
Wang

Purnanand
Elango

Chungwei
Lin

Yanting
Ma

Gordon
Wichern

Saviz
Mowlavi
William S.
Yerazunis

Nobuyuki
Yoshikawa

Jinyun
Zhang

Abraham
Goldsmith

Shingo
Kobori

Alexander
Schperberg

Jordan
Leung

Pedro
Miraldo

Joshua
Rapp

Anoop
Cherian

Radu
Corcodel

Anna
Deza

Kenji
Inomata

Jing
Liu
-
Awards
-
AWARD Mitsubishi Electric and MERL work recognized with IEEJ Distinguished Paper Award Date: June 1, 2025
Awarded to: Arvind Raghunathan, Daniel Nikovski
MERL Contacts: Daniel N. Nikovski; Arvind Raghunathan
Research Areas: Electric Systems, OptimizationBrief- A publication jointly authored by Mitsubishi Electric Corporation's Advanced Technology Center (ATC) and MERL researchers has been recognized with the 2025 IEEJ Distinguished Paper Award by the Institute of Electrical Engineers Japan. The paper titled "Power Band Model Based on Flow Network and Weekly Unit Commitment Problem Considering Reserve Market" published in the IEEJ Transactions on Power and Energy presents a novel Unit Commitment formulation for scheduling the generator operations. Arvind Raghunathan and Daniel Nikovksi were co-authors on this publication.
-
AWARD Mitsubishi Electric Team Wins Awards at GalFer Contest Date: June 23, 2025
Awarded to: Bingnan Wang, Tatsuya Yamamoto, Yusuke Sakamoto, Siyuan Sun, Toshiaki Koike-Akino, and Ye Wang
MERL Contacts: Toshiaki Koike-Akino; Bingnan Wang; Ye Wang
Research Areas: Machine Learning, Multi-Physical Modeling, OptimizationBrief- The MELSUR (Mitsubishi Electric SURrogate) team, consisting of a group of MERL and Mitsubishi Electric researchers, ranked first in two out of three categories in the GalFer Contest.
The GalFer (Galileo Ferraris) contest aims to compare the accuracy and efficiency of data-driven methodologies for the multi-physics simulation of traction electric machines. A total of 26 teams worldwide participated in the contest, which consists of three categories. The MELSUR team, including MERL staff Bingnan Wang, Toshiaki Koike-Akino, Ye Wang, MERL intern Siyuan Sun, Mitsubishi Electric researchers Tatsuya Yamamoto and Yusuke Sakamoto, ranked first for the category of "Novelty" and "Interpolation". The results were announced during an award ceremony at the COMPUMAG 2025 conference in Naples, Italy.
- The MELSUR (Mitsubishi Electric SURrogate) team, consisting of a group of MERL and Mitsubishi Electric researchers, ranked first in two out of three categories in the GalFer Contest.
-
AWARD MERL Researchers Win Best Workshop Poster Award at the 2023 IEEE International Conference on Robotics and Automation (ICRA) Date: June 2, 2023
Awarded to: Yuki Shirai, Devesh Jha, Arvind Raghunathan and Dennis Hong
MERL Contact: Arvind Raghunathan
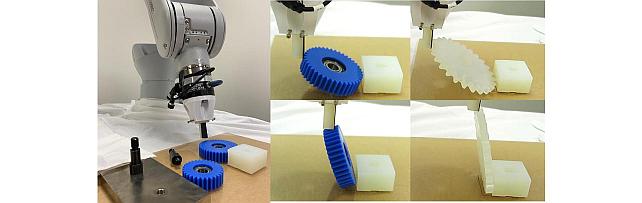
Research Areas: Artificial Intelligence, Optimization, RoboticsBrief- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
The paper presents a technique to manipulate an object using a tool in a closed-loop fashion using vision-based tactile sensors. More information about the workshop and the various speakers can be found here https://sites.google.com/view/icra2023embracingcontacts/home.
- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
See All Awards for Optimization -
-
News & Events
-
NEWS MERL researchers present 9 papers at IEEE ICRA 2026 Date: June 1, 2026 - June 5, 2026
Where: Vienna, Austria
MERL Contacts: Radu Corcodel; Stefano Di Cairano; Purnanand Elango; Siddarth Jain; Alexander Schperberg; Kento Tomita
Research Areas: Artificial Intelligence, Computer Vision, Control, Dynamical Systems, Machine Learning, Optimization, RoboticsBrief- MERL researchers presented nine papers at the recently concluded IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria. The papers covered a broad set of topics in robotics, including robot perception, visuo-tactile sensing, contact and pose estimation, manipulation, reinforcement learning, diffusion policies, loco-manipulation, contact-implicit trajectory optimization, legged locomotion, localization, and perception-aware planning.
IEEE ICRA is the flagship conference of the IEEE Robotics and Automation Society and the world’s largest and most comprehensive technical conference focused on research advances and the latest technological developments in robotics. The event attracts nearly 8,000 participants and receives more than 5,000 paper submissions.
- MERL researchers presented nine papers at the recently concluded IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria. The papers covered a broad set of topics in robotics, including robot perception, visuo-tactile sensing, contact and pose estimation, manipulation, reinforcement learning, diffusion policies, loco-manipulation, contact-implicit trajectory optimization, legged locomotion, localization, and perception-aware planning.
-
NEWS MERL researchers present 8 papers at ACC 2026 Date: May 26, 2026 - May 29, 2026
Where: New Orleans, USA
MERL Contacts: Scott A. Bortoff; Vedang M. Deshpande; Stefano Di Cairano; Christopher R. Laughman; Jordan Leung; Hongtao Qiao; Zhaolin Ren; Abraham P. Vinod; Yebin Wang
Research Areas: Control, Dynamical Systems, Optimization, RoboticsBrief- MERL researchers presented 8 papers at the recently concluded American Control Conference (ACC) 2026 in New Orleans, USA. The papers covered a wide range of topics including robust controllable set computation, vapor compression cycle calibration, task-reasoning LLM agents, Minkowski-cost stable MPC, polynomial chaos approximation, invariant-set motion planning, heat-pump MPC architectures, and relaxed barrier-function MPC. Additionally, Zhaolin Ren was an invited speaker at Multi-Agent Dynamic Games workshop, and Abraham Vinod served as a panelist at the Professional Development and Career Advice for Young Professionals session.
As a sponsor of the conference, MERL maintained a booth for open discussions with researchers and students, and hosted a special session to discuss highlights of MERL research and work philosophy.
- MERL researchers presented 8 papers at the recently concluded American Control Conference (ACC) 2026 in New Orleans, USA. The papers covered a wide range of topics including robust controllable set computation, vapor compression cycle calibration, task-reasoning LLM agents, Minkowski-cost stable MPC, polynomial chaos approximation, invariant-set motion planning, heat-pump MPC architectures, and relaxed barrier-function MPC. Additionally, Zhaolin Ren was an invited speaker at Multi-Agent Dynamic Games workshop, and Abraham Vinod served as a panelist at the Professional Development and Career Advice for Young Professionals session.
See All News & Events for Optimization -
-
Research Highlights
-
Internships
-
MS0259: Internship - Multi-Fidelity Dynamic Models for Energy Systems
-
CI0213: Internship - Efficient Foundation Models for Edge Intelligence
-
MS0098: Internship - Control and Estimation for Large-Scale Thermofluid Systems
See All Internships for Optimization -
-
Openings
-
CI0177: Postdoctoral Research Fellow - Agentic AI
-
SA0297: Postdoctoral Research Fellow - AI for Science
-
MS0268: Research Scientist - Multiphysical Systems
See All Openings at MERL -
-
Recent Publications
- , "Coordinated Energy-Aware Job Scheduling and Flexibility Provisioning in Distributed Data Centers", IEEE PES General Meeting, July 2026.BibTeX TR2026-113 PDF
- @inproceedings{Kar2026jul,
- author = {Kar, Aditya Shankar and Sun, Hongbo and Raghunathan, Arvind and Guo, Jianlin},
- title = {{Coordinated Energy-Aware Job Scheduling and Flexibility Provisioning in Distributed Data Centers}},
- booktitle = {IEEE PES General Meeting},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-113}
- }
- , "Scalable DAE-Constrained PINODE Framework for Vapor-Compression HVAC Systems", International Refrigeration and Air Conditioning Conference at Purdue, July 2026.BibTeX TR2026-111 PDF
- @inproceedings{Zhai2026jul,
- author = {Zhai, Hanfeng and Qiao, Hongtao and Mansour, Hassan and Laughman, Christopher R.},
- title = {{Scalable DAE-Constrained PINODE Framework for Vapor-Compression HVAC Systems}},
- booktitle = {International Refrigeration and Air Conditioning Conference at Purdue},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-111}
- }
- , "On State Selection for Vapor Compression Cycle Models with Zeotropic Refrigerant Mixtures", Purdue Air-Conditioning and Refrigeration Conference, July 2026.BibTeX TR2026-109 PDF
- @inproceedings{Laughman2026jul,
- author = {{Laughman, Christopher R. and Qiao, Hongtao and Bortoff, Scott A. and Deshpande, Vedang M.}},
- title = {{On State Selection for Vapor Compression Cycle Models with Zeotropic Refrigerant Mixtures}},
- booktitle = {Purdue Air-Conditioning and Refrigeration Conference},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-109}
- }
- , "MOBIUS: A Multi-Modal Bipedal Robot that can Walk, Crawl, Climb, and Roll", Robotics Science and Systems, July 2026.BibTeX TR2026-110 PDF Video
- @inproceedings{Schperberg2026jul,
- author = {Schperberg, Alexander and Tanaka, Yusuke and {Di Cairano}, Stefano and Hong, Dennis},
- title = {{MOBIUS: A Multi-Modal Bipedal Robot that can Walk, Crawl, Climb, and Roll}},
- booktitle = {Robotics Science and Systems},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-110}
- }
- , "Coordinated aerial inspection of infrastructure with heterogeneous drones", World Congress of the International Federation of Automatic Control (IFAC), July 2026.BibTeX TR2026-101 PDF
- @inproceedings{Folorunsho2026jul,
- author = {Folorunsho, Samuel and Hayner, Christopher and {Di Cairano}, Stefano and Vinod, Abraham P.},
- title = {{Coordinated aerial inspection of infrastructure with heterogeneous drones}},
- booktitle = {World Congress of the International Federation of Automatic Control (IFAC)},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-101}
- }
- , "Closed-Loop Co-Design of Motors, Motions, and Feedback Control for Robotic Manipulators", Journal of Artificial Intelligence for Automation, DOI: 10.53941/jaia.2026.100008, Vol. 1, No. 2, June 2026.BibTeX TR2026-088 PDF
- @article{Lin2026jun2,
- author = {Lin, Jue-Te and Lu, Zehui and Wang, Yebin},
- title = {{Closed-Loop Co-Design of Motors, Motions, and Feedback Control for Robotic Manipulators}},
- journal = {Journal of Artificial Intelligence for Automation},
- year = 2026,
- volume = 1,
- number = 2,
- month = jun,
- doi = {10.53941/jaia.2026.100008},
- url = {https://www.merl.com/publications/TR2026-088}
- }
- , "Nonlinear Magnetic and Structural Topology Optimization of SynRM Rotors", Biennial IEEE Conference on Electromagnetic Field Computation (CEFC), June 2026.BibTeX TR2026-079 PDF
- @inproceedings{Das2026jun,
- author = {Das, Ghanendra and Wang, Bingnan and Lin, Chungwei},
- title = {{Nonlinear Magnetic and Structural Topology Optimization of SynRM Rotors}},
- booktitle = {Biennial IEEE Conference on Electromagnetic Field Computation (CEFC)},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-079}
- }
- , "Data-driven Spatial Classification using Multi-Arm Bandits for Monitoring with Energy-Constrained Mobile Robots", IEEE Transactions on Control Systems Technology, June 2026.BibTeX TR2026-078 PDF Video
- @article{Lin2026jun,
- author = {Lin, Xiaoshan and Nayak, Siddharth and {Di Cairano}, Stefano and Vinod, Abraham P.},
- title = {{Data-driven Spatial Classification using Multi-Arm Bandits for Monitoring with Energy-Constrained Mobile Robots}},
- journal = {IEEE Transactions on Control Systems Technology},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-078}
- }
- , "Coordinated Energy-Aware Job Scheduling and Flexibility Provisioning in Distributed Data Centers", IEEE PES General Meeting, July 2026.
-
Videos
-
Software & Data Downloads
-
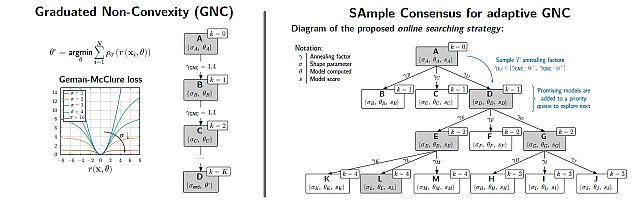
SAmple Consensus for Adaptive Graduated Non-Convexity -
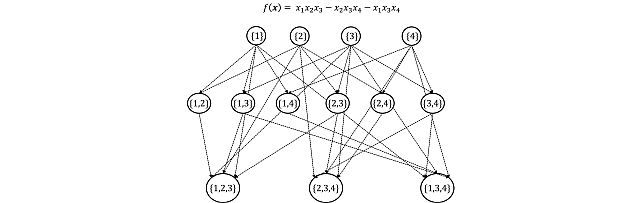
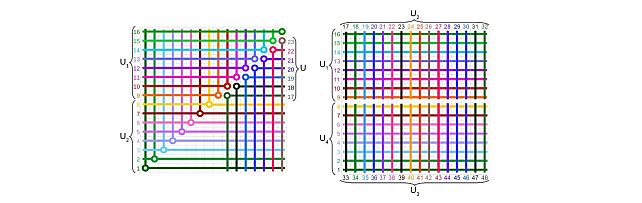
Optimal Recursive McCormick Linearization of MultiLinear Programs -
Convex sets in Python -
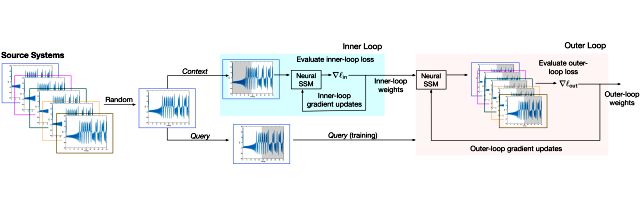
Meta-Learning State Space Models -
Python-based Robotic Control & Optimization Package -
Template Embeddings for Adiabatic Quantum Computation -
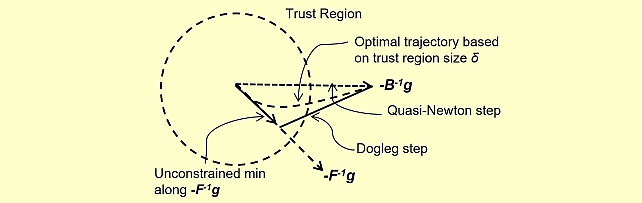
Quasi-Newton Trust Region Policy Optimization -
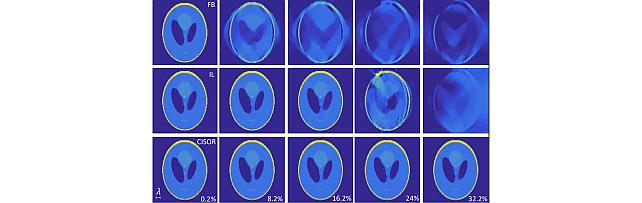
Convergent Inverse Scattering using Optimization and Regularization
-