Suhas Lohit

- Phone: 617-621-7569
- Email:
-
Position:
Research / Technical Staff
Principal Research Scientist -
Education:
Ph.D., Arizona State University, 2019 -
Research Areas:
External Links:
Suhas' Quick Links
-
Biography
Before coming to MERL, Suhas worked as an intern at MERL (summer 2018), SRI International (summer 2017) and Nvidia (summer 2016). His research interests include computer vision, computational imaging and deep learning. Recently, his research focus has been on creating hybrid model- and data-driven neural architectures for various applications in imaging and vision. He won the Best Paper Award at the CVPR workshop on Computational Cameras and Displays in 2015 and the University Graduate Fellowship at ASU for 2015-16.
-
Recent News & Events
-
NEWS MERL Presents 4 Main Conference Papers and 6 Workshop Papers at ICML 2026 Date: July 6, 2026 - July 11, 2026
Where: COEX, Seoul, South Korea
MERL Contacts: Moitreya Chatterjee; Anoop Cherian; Stefano Di Cairano; Toshiaki Koike-Akino; Christopher R. Laughman; Jing Liu; Suhas Lohit; Kuan-Chuan Peng; Alexander Schperberg; Ye Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Computer Vision, Machine Learning, Signal ProcessingBrief- MERL researchers are proud to present 4 main conference papers and 6 workshop papers at ICML 2026. ICML, taking place from July 6-11 in Seoul, South Korea, is a premier international conference in machine learning.
Main Conference Papers with MERL Authors:
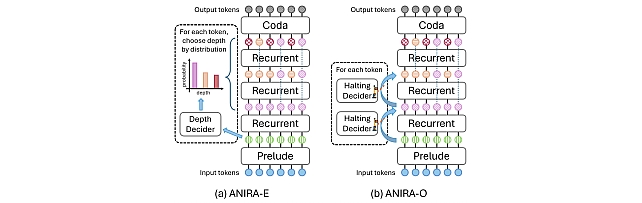
1. Understanding Dynamic Compute Allocation in Recurrent Transformers by Ibraheem Muhammad Moosa, Suhas Lohit, Ye Wang, Moitreya Chatterjee, and Wenpeng Yin.
2. LLawCo: Learning Laws of Cooperation for Modeling Embodied Multi-Agent Behavior by Qinhong Zhou, Chuang Gan, and Anoop Cherian.
3. Memory-Distilled Selection for Noise-Robust Anomaly Detection by Sirojbek Safarov, Jaewoo Park, Yoon G. Jung, Kuan-Chuan Peng, Wonchul Kim, Seongdeok Bang, and Octavia Camps.
4. Partial Ring Scan: Revisiting Scan Order in Vision State Space Models by Yi-Kuan Hsieh, Kuan-Chuan Peng, Xin Li, Ming-Ching Chang, Yu-Chee Tseng, and Jun-Wei Hsieh.
Workshop Papers with MERL Authors:
1. WISE: Weighted Iterative Society-of-Experts for Multimodal Multi-Agent Debate with Probabilistic Consensus by Anoop Cherian, Suhas Lohit, and Kuan-Chuan Peng. (Workshop on Scalable Learning and Optimization for Efficient Multimodal AI Agents (SCALE))
2. MIRROR: Multisensory Implicit Rejection-sampled RObotic policy by Amisha Bhaskar, Pratap Tokekar, Stefano Di Cairano, and Alexander Schperberg. (Workshop on Structured Probabilistic Inference & Generative Modeling)
3. Reinforced Neural Processes: Memory-Efficient Time-Series Forecasting with a World-Feedback-Trained Memory Policy by Nibraas Khan, Gordon Wichern, and Christopher R. Laughman. (Workshop on Reinforcement Learning from World Feedback (RLxF))
4. Connecting Low-Rank Adapters and Policy Stability in GRPO Fine-Tuning by Antonin Rottman, Francesco Tonin, Yongtao Wu, Toshiaki Koike-Akino, and Volkan Cevher. (Workshop on Connecting Low-rank Representations in AI (CoLorAI))
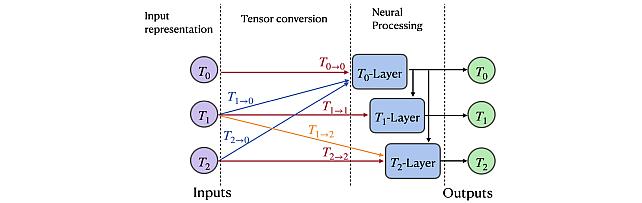
5. EinSort: Sorting is All We Need for Tensorizing LLM by Toshiaki Koike-Akino, Jing Liu, and Ye Wang. (Workshop on Connecting Low-rank Representations in AI (CoLorAI))
6. Temper and Tilt Lead to SLOP: Reward Hacking Mitigation with Inference-Time Alignment by Ye Wang, and Jing Liu, and Toshiaki Koike-Akino. (Workshop on Agents in the Wild: Safety, Security, and Beyond)
- MERL researchers are proud to present 4 main conference papers and 6 workshop papers at ICML 2026. ICML, taking place from July 6-11 in Seoul, South Korea, is a premier international conference in machine learning.
-
NEWS MERL Presents 7 Papers and 2 Workshops at CVPR 2026 Date: June 3, 2026 - June 7, 2026
Where: Colorado Convention Center, Denver, Colorado
MERL Contacts: Moitreya Chatterjee; Anoop Cherian; Kaen Kogashi; Suhas Lohit; Lalit Manam; Tim K. Marks; Pedro Miraldo; Kuan-Chuan Peng
Research Areas: Artificial Intelligence, Computer Vision, Machine LearningBrief- MERL researchers are proud to present 7 papers, including two highlight papers (top 3.6% of submissions), and 2 workshops at CVPR 2026. CVPR, taking place from June 3-7 in Denver, CO, USA, is a premier international conference in computer vision.
Papers with MERL Authors:
1. Point4Cast: Streaming Dynamic Scene Reconstruction and Forecasting by Xinhang Liu, Pedro Miraldo, Suhas Lohit, Huaizu Jiang, Naoko Sawada, Yu-Wing Tai, Chi-Keung Tang, and Moitreya Chatterjee (Highlight Paper)
2. Parallel Rigidity Matters for Bundle Adjustment by Lalit Manam and Venu Govindu (Highlight Paper)
3. Revisiting Monocular SLAM with Spatio-Temporal Scene Modeling by Valter Piedade, Lalit Manam, Masashi Yamazaki, and Pedro Miraldo
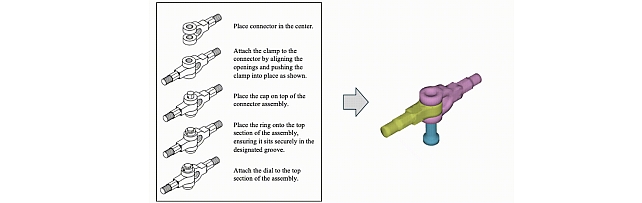
4. AssemblyBench: Physics-Aware Assembly of Complex Industrial Objects by Danrui Li, Jiahao Zhang, Bernhard Egger, Moitreya Chatterjee, Suhas Lohit, Tim K. Marks, and Anoop Cherian
5. LASER: Layer-wise Scale Alignment for Training-Free Streaming 4D Reconstruction by Tianye Ding, Yiming Xie, Yiqing Liang, Moitreya Chatterjee, Pedro Miraldo, and Huaizu Jiang
6. SoREL: Soft-Label Refurbishment with Ensemble Learning for Noisy Long-Tailed Classification by Jun-Wei Hsieh, Ying-Hsuan Wu, Yi-Kuan Hsieh, Xin Li, Kuan-Chuan Peng, Ming-Ching Chang (CVPR Findings paper)
7. MMHOI: Complex 3D Multi-Human-Object Interaction Understanding by Kaen Kogashi and Anoop Cherian (PhysHuman Workshop paper)
Workshops Co-Organized by MERL:
1. Multimodal Algorithmic Reasoning Workshop by Anoop Cherian, Suhas Lohit, Kuan-Chuan Peng, Honglu Zhou, Kevin Smith, and Josh Tenenbaum
2. The Third Workshop on Anomaly Detection with Foundation Models by Kuan-Chuan Peng, Ying Zhao, and Abhishek Aich
- MERL researchers are proud to present 7 papers, including two highlight papers (top 3.6% of submissions), and 2 workshops at CVPR 2026. CVPR, taking place from June 3-7 in Denver, CO, USA, is a premier international conference in computer vision.
See All News & Events for Suhas -
-
Awards
-
AWARD Best Paper - Honorable Mention Award at WACV 2021 Date: January 6, 2021
Awarded to: Rushil Anirudh, Suhas Lohit, Pavan Turaga
MERL Contact: Suhas Lohit
Research Areas: Computational Sensing, Computer Vision, Machine LearningBrief- A team of researchers from Mitsubishi Electric Research Laboratories (MERL), Lawrence Livermore National Laboratory (LLNL) and Arizona State University (ASU) received the Best Paper Honorable Mention Award at WACV 2021 for their paper "Generative Patch Priors for Practical Compressive Image Recovery".
The paper proposes a novel model of natural images as a composition of small patches which are obtained from a deep generative network. This is unlike prior approaches where the networks attempt to model image-level distributions and are unable to generalize outside training distributions. The key idea in this paper is that learning patch-level statistics is far easier. As the authors demonstrate, this model can then be used to efficiently solve challenging inverse problems in imaging such as compressive image recovery and inpainting even from very few measurements for diverse natural scenes.
- A team of researchers from Mitsubishi Electric Research Laboratories (MERL), Lawrence Livermore National Laboratory (LLNL) and Arizona State University (ASU) received the Best Paper Honorable Mention Award at WACV 2021 for their paper "Generative Patch Priors for Practical Compressive Image Recovery".
-
-
Research Highlights
-
Point4Cast: Streaming Dynamic Scene Reconstruction and Forecasting -
AssemblyBench: Physics-Aware Assembly of Complex Industrial Objects -
TI2V-Zero: Zero-Shot Image Conditioning for Text-to-Video Diffusion Models -
Gear-NeRF: Free-Viewpoint Rendering and Tracking with Motion-Aware Spatio-Temporal Sampling -
Steered Diffusion
-
-
MERL Publications
- , "Understanding Dynamic Compute Allocation in Recurrent Transformers", International Conference on Machine Learning (ICML), July 2026.BibTeX TR2026-090 PDF Software Presentation
- @inproceedings{Moosa2026jul,
- author = {{Moosa, Ibraheem Muhammad and Lohit, Suhas and Wang, Ye and Chatterjee, Moitreya and Yin, Wenpeng}},
- title = {{Understanding Dynamic Compute Allocation in Recurrent Transformers}},
- booktitle = {International Conference on Machine Learning (ICML)},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-090}
- }
- , "WISE: Weighted Iterative Society-of-Experts for Multimodal Multi-Agent Debate with Probabilistic Consensus", ICML SCALE AI Workshop, June 2026.BibTeX TR2026-083 PDF
- @inproceedings{Cherian2026jun,
- author = {Cherian, Anoop and Lohit, Suhas and Peng, Kuan-Chuan},
- title = {{WISE: Weighted Iterative Society-of-Experts for Multimodal Multi-Agent Debate with Probabilistic Consensus}},
- booktitle = {ICML SCALE AI Workshop},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-083}
- }
- , "AssemblyBench: Physics-Aware Assembly of Complex Industrial Objects", IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2026.BibTeX TR2026-076 PDF Video Data Software
- @inproceedings{Li2026jun,
- author = {Li, Danrui and Zhang, Jiahao and Egger, Bernhard and Chatterjee, Moitreya and Lohit, Suhas and Marks, Tim K. and Cherian, Anoop},
- title = {{AssemblyBench: Physics-Aware Assembly of Complex Industrial Objects}},
- booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-076}
- }
- , "Point4Cast: Streaming Dynamic Scene Reconstruction and Forecasting", IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2026.BibTeX TR2026-077 PDF
- @inproceedings{Liu2026jun,
- author = {Liu, Xinhang and Miraldo, Pedro and Lohit, Suhas and Jiang, Huaizu and Sawada, Naoko and Tai, Yu-Wing and Tang, Chi-Keung and Chatterjee, Moitreya},
- title = {{Point4Cast: Streaming Dynamic Scene Reconstruction and Forecasting}},
- booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-077}
- }
- , "Recovering Pulse Waves from Video Using Deep Unrolling and Deep Equilibrium Models", IEEE Transactions on Image Processing, DOI: 10.1109/TIP.2026.3671653, Vol. 35, pp. 2755-2770, March 2026.BibTeX TR2026-031 PDF
- @article{Shenoy2026mar,
- author = {Shenoy, Vineet and Lohit, Suhas and Mansour, Hassan and Chellappa, Rama and Marks, Tim K.},
- title = {{Recovering Pulse Waves from Video Using Deep Unrolling and Deep Equilibrium Models}},
- journal = {IEEE Transactions on Image Processing},
- year = 2026,
- volume = 35,
- pages = {2755--2770},
- month = mar,
- doi = {10.1109/TIP.2026.3671653},
- issn = {1941-0042},
- url = {https://www.merl.com/publications/TR2026-031}
- }
- , "Understanding Dynamic Compute Allocation in Recurrent Transformers", International Conference on Machine Learning (ICML), July 2026.
-
Other Publications
- , "Temporal Transformer Networks: Joint Learning of Invariant and Discriminative Time Warping", Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2019, pp. 12426-12435.BibTeX
- @Inproceedings{lohit2019temporal,
- author = {Lohit, Suhas and Wang, Qiao and Turaga, Pavan},
- title = {Temporal Transformer Networks: Joint Learning of Invariant and Discriminative Time Warping},
- booktitle = {Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
- year = 2019,
- pages = {12426--12435}
- }
- , "Convolutional neural networks for noniterative reconstruction of compressively sensed images", IEEE Transactions on Computational Imaging, Vol. 4, No. 3, pp. 326-340, 2018.BibTeX
- @Article{lohit2018convolutional,
- author = {Lohit, Suhas and Kulkarni, Kuldeep and Kerviche, Ronan and Turaga, Pavan and Ashok, Amit},
- title = {Convolutional neural networks for noniterative reconstruction of compressively sensed images},
- journal = {IEEE Transactions on Computational Imaging},
- year = 2018,
- volume = 4,
- number = 3,
- pages = {326--340},
- publisher = {IEEE}
- }
- , "Predicting Dynamical Evolution of Human Activities from a Single Image", Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, 2018, pp. 383-392.BibTeX
- @Inproceedings{lohit2018predicting,
- author = {Lohit, Suhas and Bansal, Ankan and Shroff, Nitesh and Pillai, Jaishanker and Turaga, Pavan and Chellappa, Rama},
- title = {Predicting Dynamical Evolution of Human Activities from a Single Image},
- booktitle = {Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops},
- year = 2018,
- pages = {383--392}
- }
- , "Learning invariant Riemannian geometric representations using deep nets", Proceedings of the IEEE International Conference on Computer Vision Workshops, 2017, pp. 1329-1338.BibTeX
- @Inproceedings{lohit2017learning,
- author = {Lohit, Suhas and Turaga, Pavan},
- title = {Learning invariant Riemannian geometric representations using deep nets},
- booktitle = {Proceedings of the IEEE International Conference on Computer Vision Workshops},
- year = 2017,
- pages = {1329--1338}
- }
- , "Reconnet: Non-iterative reconstruction of images from compressively sensed measurements", Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016, pp. 449-458.BibTeX
- @Inproceedings{kulkarni2016reconnet,
- author = {Kulkarni, Kuldeep and Lohit, Suhas and Turaga, Pavan and Kerviche, Ronan and Ashok, Amit},
- title = {Reconnet: Non-iterative reconstruction of images from compressively sensed measurements},
- booktitle = {Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
- year = 2016,
- pages = {449--458}
- }
- , "Direct inference on compressive measurements using convolutional neural networks", 2016 IEEE International Conference on Image Processing (ICIP), 2016, pp. 1913-1917.BibTeX
- @Inproceedings{lohit2016direct,
- author = {Lohit, Suhas and Kulkarni, Kuldeep and Turaga, Pavan},
- title = {Direct inference on compressive measurements using convolutional neural networks},
- booktitle = {2016 IEEE International Conference on Image Processing (ICIP)},
- year = 2016,
- pages = {1913--1917},
- organization = {IEEE}
- }
- , "A statistical estimation framework for energy expenditure of physical activities from a wrist-worn accelerometer", 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 2016, pp. 2631-2635.BibTeX
- @Inproceedings{wang2016statistical,
- author = {Wang, Qiao and Lohit, Suhas and Toledo, Meynard John and Buman, Matthew P and Turaga, Pavan},
- title = {A statistical estimation framework for energy expenditure of physical activities from a wrist-worn accelerometer},
- booktitle = {2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC)},
- year = 2016,
- pages = {2631--2635},
- organization = {IEEE}
- }
- , "Reconstruction-free inference on compressive measurements", Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, 2015, pp. 16-24.BibTeX
- @Inproceedings{lohit2015reconstruction,
- author = {Lohit, Suhas and Kulkarni, Kuldeep and Turaga, Pavan and Wang, Jian and Sankaranarayanan, Aswin C},
- title = {Reconstruction-free inference on compressive measurements},
- booktitle = {Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops},
- year = 2015,
- pages = {16--24}
- }
- , "Temporal Transformer Networks: Joint Learning of Invariant and Discriminative Time Warping", Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2019, pp. 12426-12435.
-
Software & Data Downloads
-
Understanding Dynamic Compute Allocation in Recurrent Transformers -
Physics-Aware Assembly of Complex Industrial Objects -
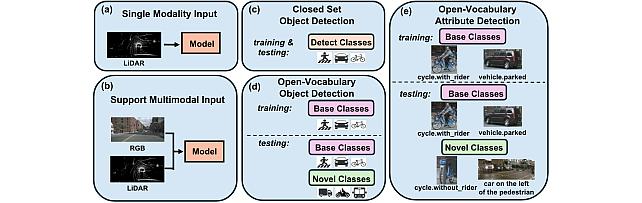
Open Vocabulary Attribute Detection Dataset -
Group Representation Networks -
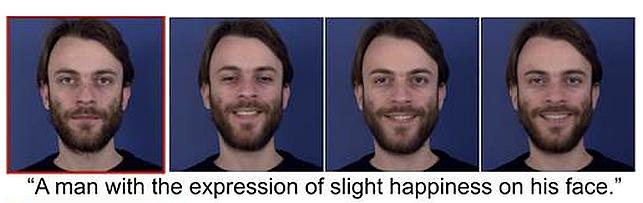
Zero-Shot Image Conditioning for Text-to-Video Diffusion Models -
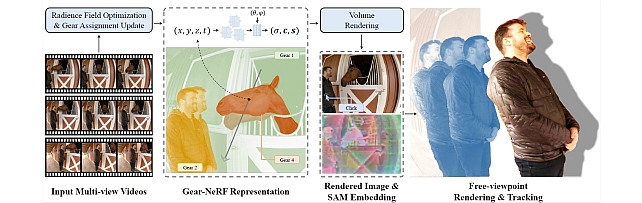
Gear Extensions of Neural Radiance Fields -

Pixel-Grounded Prototypical Part Networks -
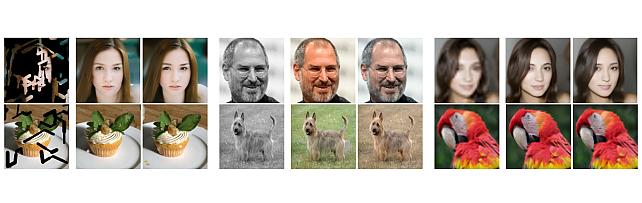
Steered Diffusion -
Simple Multimodal Algorithmic Reasoning Task Dataset -
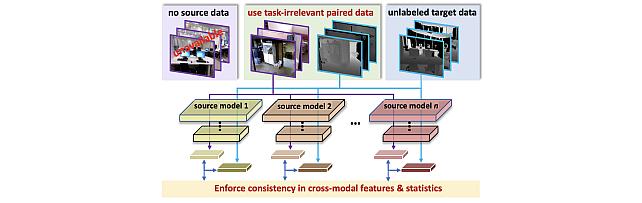
SOurce-free Cross-modal KnowledgE Transfer
-
-
Videos
-
MERL Issued Patents
-
Title: "SYSTEMS AND METHODS FOR INTERPRETABLE CLASSIFICATION OF IMAGES USING INHERENTLY EXPLAINABLE NEURAL NETWORKS"
Inventors: Jones, Michael J.; Lohit, Suhas; Cherian, Anoop; Carmichael, Zacharias
Patent No.: 12,633,103
Issue Date: May 19, 2026 -
Title: "System and Method for Cross-Modal Knowledge Transfer Without Task-Relevant Source Data"
Inventors: Lohit, Suhas; Ahmed, Sk Miraj; Peng, Kuan-Chuan; Jones, Michael J.
Patent No.: 12,511,549
Issue Date: Dec 30, 2025 -
Title: "Rendering Two-Dimensional Image of a Dynamic Three-Dimensional Scene"
Inventors: Chatterjee, Moitreya; Lohit, Suhas; Miraldo, Pedro
Patent No.: 12,475,636
Issue Date: Nov 18, 2025 -
Title: "System and Method for Generating a Radar Image of a Scene"
Inventors: Mansour, Hassan; Lohit, Suhas; Boufounos, Petros T.
Patent No.: 12,287,398
Issue Date: Apr 29, 2025 -
Title: "Systems and Methods for Multi-Spectral Image Fusion Using Unrolled Projected Gradient Descent and Convolutinoal Neural Network"
Inventors: Liu, Dehong; Lohit, Suhas; Mansour, Hassan; Boufounos, Petros T.
Patent No.: 10,891,527
Issue Date: Jan 12, 2021
-
Title: "SYSTEMS AND METHODS FOR INTERPRETABLE CLASSIFICATION OF IMAGES USING INHERENTLY EXPLAINABLE NEURAL NETWORKS"